
CANBUS的发展及网络连接方式
2019-05-28 11:00:08
root
854
CANBUS的发展及网络连接方式
拿大众集团举例,早在1997年,大众公司在PASSAT的舒适系统上采用了传输速率62.5Kbit/m的CANBUS.
98年在PASSAT和GOLF的驱动系统上增加了CANBUS,传输速率为500Kbit/m。
2000年大众公司在PASSAT和GOLF采用了带有网关的第二代CANBUS。
2001年大众公司提高了CANBUS的设计标准,将舒适系统CANBUS提高到100Kbit/m,驱动系统提高到500Kbit/m。
2002年大众集团在新PQ24平台上使用带有车载网络控制单元的第三代CANBUS。
2003年大众集团在新PQ35平台上使用5重结构的CANBUS系统,并且出现了单线的LIN-BUS。
CANBUS总线技术在不断的发展,20世纪80年代BOSCH的工程人员开始研究用于汽车串行总线系统,因为当时还没有一个网络协议能完全满足汽车工程要求。参加研究的还有梅赛德斯奔驰、英特尔公司,还有德国两所大学的教授。
1986年,BOSCH在SAE(汽车工程人员协会)大会上提出CAN,1987年英特尔就推出第一片CAN控制芯片-82526,随后飞利浦半导体推出了82C200,直到1993年CAN的国际标准ISO11898才公布,从此CAN协议被广泛的用于各类自动化控制领域。1992年CIA用户组织成立,之后指定了第一个CAN应用层CAL,1994年开始有了国际CAN学术年会(ICC),与此同时,美国汽车工程师协会以CAN为基础指定了SAEJ1939标准,用于卡车和巴士控制和通信网络。
到今天,几乎每一辆欧洲生产的轿车上都有CAN,高级客车上有两套CAN,通过网关互联,1999年一年就有近6000万个CAN控制器投入使用,2000年销售一亿多CAN芯片,2001年用在汽车上的CAN借点数目超过一亿个。基于CAN的应用层协议应用较通用的有两种:适合于工厂底层自动化和适合于机械控制的嵌入式应用。
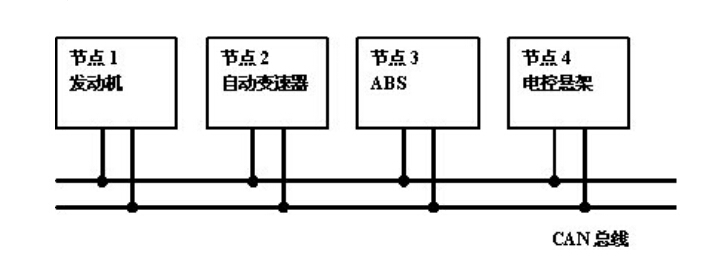
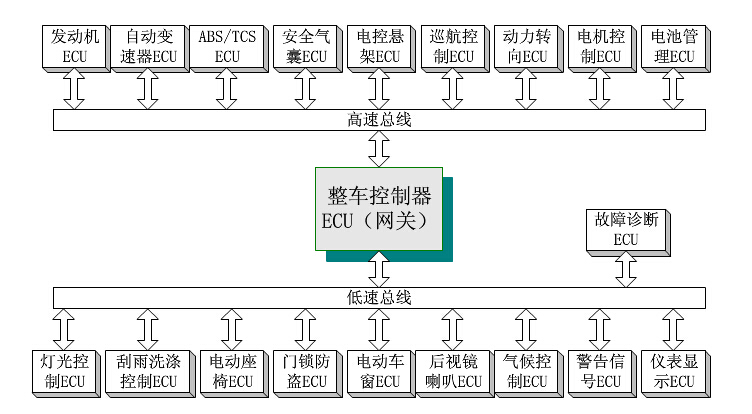
目前汽车上的网络连接方式主要采用2条CAN,一条用于驱动系统的高速CAN,速率达到500Kbit/m,主要面相实时性要求较高的控制单元,如发动机、电动机等。
另一条用于车身系统的低速CAN,速率是100Kbit/m,主要是针对车身控制的,如车灯、车门、车窗等信号的采集以及反馈。其特征是信号多但实时性要求低,因此实现成本要求低。