
CAN舒适/Infotainment数据总线的差动数据传递
2019-05-28 11:05:01
root
为了使低速CAN抗干扰性能强切电流消耗低,与CAN驱动数据相比就需要做一些改动。
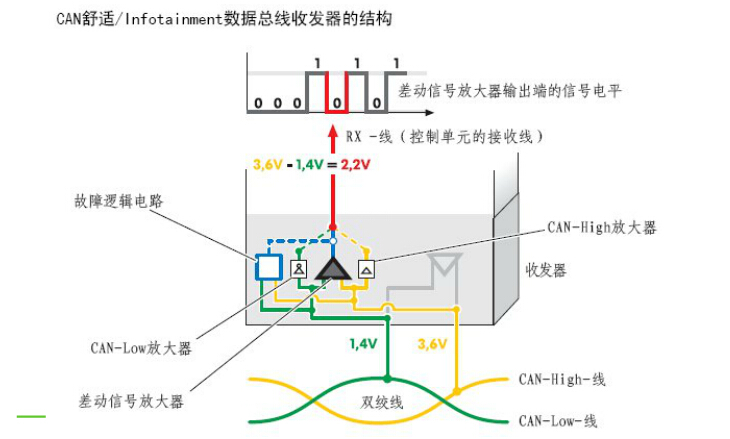
首先,由于使用了单独的驱动器(功率放大器),这两个CAN信号就不再有彼此以来的关系了。与CAN驱动数据总线不同,CAN舒适/Infotainment数据总线的CAN-HIGH线和CAN-LOW线不是通过电阻相连的。也就是说:CAN-HIGH线和CAN-LOW线不在彼此相互影响,而是彼此独立作为电压源来工作。
另外还放弃了共同的中压,在隐性状态(静电平)时,CAN-HIGH信号为0V,在显性状态时≥3.6V。
对于CAN-LOW信号来说,隐性电平为5V,显性电平≤1.4V,于是在差频信号放大器内相减后,隐性电平为-5V,显性电平为2.2V,那么隐性电平和显性电平之间的电压变化(电压提升)就提高到≥7.2V。
由于电压电平和电阻配置不同,所以在CAN驱动数据总线和CAN舒适/Infotainment数据总线之间无法进行耦合连接,另外这两种数据总线的传输速率不同,这就决定了他们无法使用不同的信号。这就需要在这两个系统之间能完成一个转换,这个转换过程是通过网关来实现的,根据车辆的不同,网关可能安装在组合仪表内,车上供电控制单元内货在自己的网关控制单元内。